具体实现
完整代码开源地址-Gitee
完整代码开源地址-Github
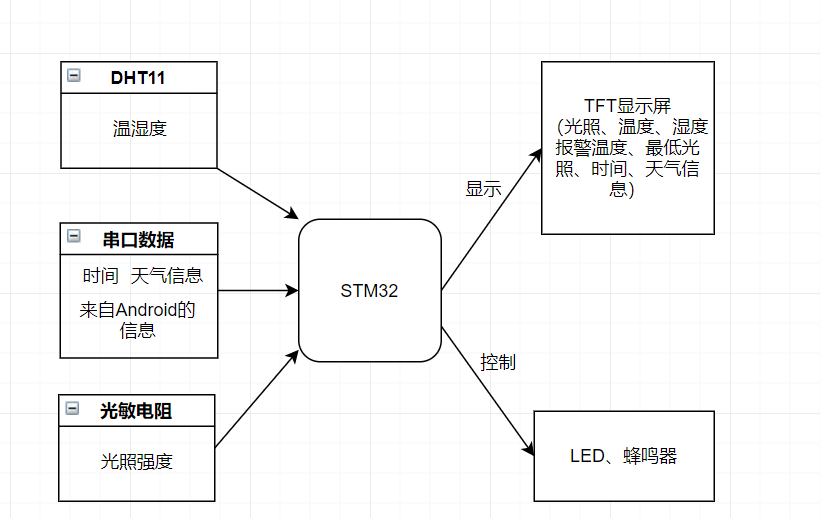
采集温度、湿度
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
|
u8 DHT11_Read_Data(u8 *temp,u8 *humi)
{
u8 buf[5];
u8 i;
DHT11_Rst();
if(DHT11_Check()==0)
{
for(i=0;i<5;i++)
{
buf[i]=DHT11_Read_Byte();
}
if((buf[0]+buf[1]+buf[2]+buf[3])==buf[4])
{
*humi=buf[0];
*temp=buf[2];
}
}else return 1;
return 0;
}
|
color:green DHT11相关代码
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
|
u8 DHT11_Init()
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOG,ENABLE);
GPIO_InitStructure.GPIO_Pin=DHT11;
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(GPIO_DHT11,&GPIO_InitStructure);
GPIO_SetBits(GPIO_DHT11,DHT11);
DHT11_Rst();
return DHT11_Check();
}
void DHT11_Rst()
{
DHT11_IO_OUT();
DHT11_DQ_OUT=0;
delay_ms(20);
DHT11_DQ_OUT=1;
delay_us(30);
}
u8 DHT11_Check()
{
u8 retry=0;
DHT11_IO_IN();
while (DHT11_DQ_IN&&retry<100)
{
retry++;
delay_us(1);
};
if(retry>=100)return 1;
else retry=0;
while (!DHT11_DQ_IN&&retry<100)
{
retry++;
delay_us(1);
};
if(retry>=100)return 1;
return 0;
}
|
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
|
u8 DHT11_Read_Bit(void)
{
u8 retry=0;
while(DHT11_DQ_IN&&retry<100)
{
retry++;
delay_us(1);
}
retry=0;
while(!DHT11_DQ_IN&&retry<100)
{
retry++;
delay_us(1);
}
delay_us(40);
if(DHT11_DQ_IN)return 1;
else return 0;
}
u8 DHT11_Read_Byte(void)
{
u8 i,dat;
dat=0;
for (i=0;i<8;i++)
{
dat<<=1;
dat|=DHT11_Read_Bit();
}
return dat;
}
|
采集光照
通过ADC3模数转换器采集电压(为模拟量)
1
2
3
4
5
6
7
8
9
10
11
12
13
| u8 Lsens_Get_Val(void)
{
u32 temp_val=0;
u8 t;
for(t=0;t<LSENS_READ_TIMES;t++)
{
temp_val+=Get_ADC3(ADC_Channel_6);
delay_ms(5);
}
temp_val/=LSENS_READ_TIMES;
if(temp_val>4000)temp_val=4000;
return (u8)(100-(temp_val/40));
}
|
color:green ADC3初始化及读取数据代码
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
|
void Lsens_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
ADC_InitTypeDef ADC_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOF,ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_ADC3, ENABLE );
RCC_APB2PeriphResetCmd(RCC_APB2Periph_ADC3, ENABLE);
RCC_APB2PeriphResetCmd(RCC_APB2Periph_ADC3, DISABLE);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AIN;
GPIO_Init(GPIOF, &GPIO_InitStructure);
ADC_DeInit(ADC3);
ADC_InitStructure.ADC_Mode = ADC_Mode_Independent;
ADC_InitStructure.ADC_ScanConvMode = DISABLE;
ADC_InitStructure.ADC_ContinuousConvMode = DISABLE;
ADC_InitStructure.ADC_ExternalTrigConv = ADC_ExternalTrigConv_None;
ADC_InitStructure.ADC_DataAlign = ADC_DataAlign_Right;
ADC_InitStructure.ADC_NbrOfChannel = 1;
ADC_Init(ADC3, &ADC_InitStructure);
ADC_Cmd(ADC3, ENABLE);
ADC_ResetCalibration(ADC3);
while(ADC_GetResetCalibrationStatus(ADC3));
ADC_StartCalibration(ADC3);
while(ADC_GetCalibrationStatus(ADC3));
}
u16 Get_ADC3(u8 ch)
{
ADC_RegularChannelConfig(ADC3, ch, 1, ADC_SampleTime_239Cycles5 );
ADC_SoftwareStartConvCmd(ADC3, ENABLE);
while(!ADC_GetFlagStatus(ADC3, ADC_FLAG_EOC ));
return ADC_GetConversionValue(ADC3);
}
u8 Lsens_Get_Val(void)
{
u32 temp_val=0;
u8 t;
for(t=0;t<LSENS_READ_TIMES;t++)
{
temp_val+=Get_ADC3(ADC_Channel_6);
delay_ms(5);
}
temp_val/=LSENS_READ_TIMES;
if(temp_val>4000)temp_val=4000;
return (u8)(100-(temp_val/40));
}
|
串口(USART2)获取数据
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
| char USART2_RX_BUF[RX_BUF_MAX_LEN];
u16 USART2_RX_STA = 0;
void USART2_IRQHandler(void){
u8 r;
if(USART_GetITStatus(USART2, USART_IT_RXNE) != RESET)
{
r = USART_ReceiveData(USART2);
if((USART2_RX_STA&0x8000)==0)
{
if(USART2_RX_STA&0x4000)
{
if(r!=0x0a)USART2_RX_STA=0;
else {
USART2_RX_STA = 0;
}
}
else
{
if(r==0x0d)USART2_RX_STA|=0x4000;
else
{
USART2_RX_BUF[USART2_RX_STA&0X3FFF]=r;
USART2_RX_STA++;
if(USART2_RX_STA>(RX_BUF_MAX_LEN-1))USART2_RX_STA=0;
}
}
}
}
}
|
color:green USART2初始化等代码
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
| void usart2_init( void )
{
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_USART2, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);
RCC_APB2PeriphClockCmd( RCC_APB2Periph_GPIOA, ENABLE );
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO,ENABLE);
GPIO_PinRemapConfig(GPIO_Remap_SWJ_JTAGDisable,ENABLE);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_2;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_Init(GPIOA, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_3;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init(GPIOA, &GPIO_InitStructure);
USART_InitStructure.USART_BaudRate = 115200;
USART_InitStructure.USART_WordLength = USART_WordLength_8b;
USART_InitStructure.USART_StopBits = USART_StopBits_1;
USART_InitStructure.USART_Parity = USART_Parity_No;
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;
USART_Init(USART2, &USART_InitStructure);
USART_ClearFlag(USART2, USART_FLAG_TC);
USART_ITConfig(USART2, USART_IT_RXNE, ENABLE);
USART_Cmd(USART2, ENABLE);
NVIC_InitStructure.NVIC_IRQChannel = USART2_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=3 ;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
}
|
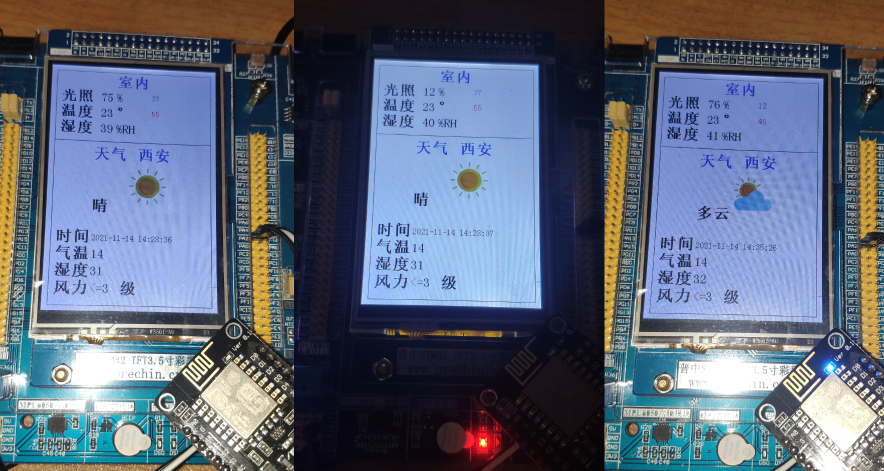
串口数据处理
提取时间、天气信息;为了方便,ESP8266发给STM32的数据都是用逗号隔开的,如 时间,天气,气温,湿度,……
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
|
struct WeatherData processWdata3(char data[]){
u8 i=0, j=0, i0=0, k=0;
u8 ind=0, jnd=0;
int slen = strlen(data);
struct WeatherData weather;
for(ind=0; ind<8; ind++){
switch(ind){
case 0: {
for(jnd=0; jnd<20; jnd++){
weather.datetime[jnd]='\0';
}
};break;
case 1: {
for(jnd=0; jnd<10; jnd++){
weather.city[jnd]='\0';
}
};break;
case 2: {
for(jnd=0; jnd<10; jnd++){
weather.humi[jnd]='\0';
}
};break;
case 3: {
for(jnd=0; jnd<10; jnd++){
weather.temp[jnd]='\0';
}
};break;
case 4: {
for(jnd=0; jnd<10; jnd++){
weather.weather[jnd]='\0';
}
};break;
case 5: {
for(jnd=0; jnd<10; jnd++){
weather.windpower[jnd]='\0';
}
};break;
case 6: {
for(jnd=0; jnd<10; jnd++){
minLsens_str[jnd]='\0';
}
};break;
case 7: {
for(jnd=0; jnd<10; jnd++){
alarmTemp_str[jnd]='\0';
}
};break;
}
}
strcpy(weather.city, "西安");
for(i=0; i<slen; i++){
if(data[i]==',') {
i0++;
for(j=k; j<i; j++){
if(i0==1) weather.datetime[j-k]=data[j];
else if(i0==2) weather.weather[j-k]=data[j];
else if(i0==3) weather.temp[j-k]=data[j];
else if(i0==4) weather.humi[j-k]=data[j];
else if(i0==5) weather.windpower[j-k]=data[j];
else if(i0==6) alarmTemp_str[j-k]=data[j];
else if(i0==7) minLsens_str[j-k]=data[j];
}
k=i+1;
}
}
return weather;
}
|
发送数据
通过定时器TIM2定时1s发送一次数据(json字符串格式)给ESP8266模块
1
2
3
4
5
6
7
8
9
10
| void TIM2_IRQHandler(void){
if(TIM_GetITStatus(TIM2, TIM_IT_Update) != RESET){
ESP8266_Usart("{\"temp\":\"%d\",\"humi\":\"%d\",\"light\":\"%d\",\"ledsta\":\"%d\",\"beepsta\":\"%d\"}\r\n", dhtData.temp, dhtData.humi, lsens, ledSta, beepSta);
TIM_ClearITPendingBit(TIM2, TIM_IT_Update);
}
}
|
color:green 初始化TIM2
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
|
void TIM2_init(u16 arr, u16 psc){
TIM_TimeBaseInitTypeDef TIM_Structure;
NVIC_InitTypeDef NVIC_Structure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE);
TIM_Structure.TIM_Period = arr - 1;
TIM_Structure.TIM_Prescaler = psc-1;
TIM_Structure.TIM_ClockDivision = 0;
TIM_Structure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInit(TIM2, &TIM_Structure);
TIM_ITConfig(TIM2, TIM_IT_Update, ENABLE);
TIM_ClearITPendingBit(TIM2, TIM_IT_Update);
NVIC_Structure.NVIC_IRQChannel = TIM2_IRQn;
NVIC_Structure.NVIC_IRQChannelPreemptionPriority = 6;
NVIC_Structure.NVIC_IRQChannelSubPriority = 4;
NVIC_Structure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_Structure);
TIM_ClearFlag(TIM2, TIM_FLAG_Update);
TIM_Cmd(TIM2, ENABLE);
}
|
LED与蜂鸣器控制
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
| void ledBeepOnOrNot(u8 lsens, u8 mlsens, u8 t, u8 alarmT){
if(lsens < mlsens){
LED1 = 0;
ledSta = 1;
}
else{
LED1 = 1;
ledSta = 0;
}
if(t>alarmT){
BEEP=1;
beepSta = 1;
}
else{
BEEP=0;
beepSta = 0;
}
}
|